
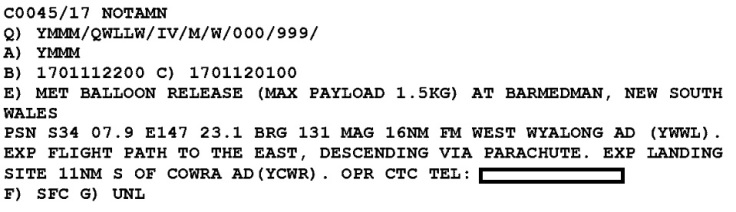
Here’s the video of OZHAB01 being launched from Barmedman NSW as well as other data I have collated so far
Unfortunately I have not yet recovered the payload of OZHAB01 so I am unable to provide any of the on board collected data. However I do have some flight data that was collected via APRS and the RTTY transmitter which gives a good indication of the flight progress.
The APRS was being received by digipeaters around 1000m and continued to have contact until it burst about 31000m. APRS Google Earth KML OZHAB01
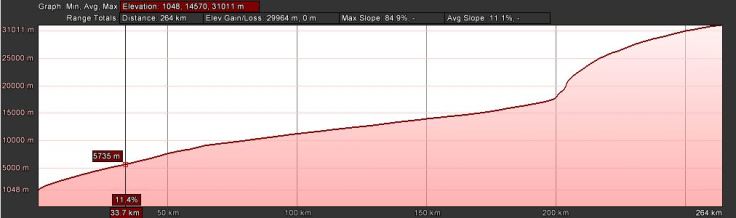
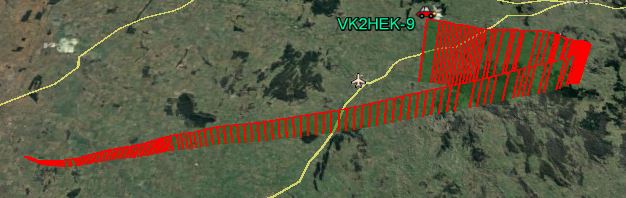
The RTTY was decoded on my laptop as I chased the balloon and followed the same path as the APRS. I did loose signal a few times as it was climbing to its burst altitude. RAW KML of RTTY Flight for Google Earth


Pre fill of balloon

OZHAB01 in flight

Almost ready
Post Flight thoughts for next time
- Ensure I pack a highly directional antenna to locate the payload.
- Something with variable attenuation would be great.
- Use a weight instead of digital scales to determine correct lift and helium dosage.
- The digital scales were difficult to read as the wind blew the balloon around, which lead to less helium in the balloon and a slower ascent.
- Cut balloon away when approaching max altitude to ensure a cleaner descent.
- As I haven’t recovered payload yet, I don’t know how much balloon was intact and this could have impeded the parachute
- Don’t forget the tarp next time.
- Blankets worked , but were too small
- Improve my APRS decode.
- APRS was decoding sporadically.
- I didn’t have an app installed that would upload the APRS data to the web


 t overly large. Its also very easy to cut through to make holes for the camera gear. I still need to work on the final attachment to the parachute as the esky comes pre-fitted with a rope tied lid. I will most likely replace the provided rope with my own and add an additional two points to provide more stability during the flight.
t overly large. Its also very easy to cut through to make holes for the camera gear. I still need to work on the final attachment to the parachute as the esky comes pre-fitted with a rope tied lid. I will most likely replace the provided rope with my own and add an additional two points to provide more stability during the flight.




Recent Comments